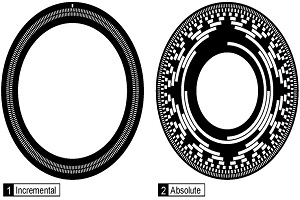
تفاوت انکودر های افزایشی (INCREMENTAL) با مطلق (Absolute)
 با مطلق (Absolute)")
انواع انکودر

انکودر نسبی
این انکودر ساده ترین نوع در بین انکودر ها هست و طرز کار آن، یک فرستنده در یک سمت آن و یک گیرنده در سمت دیگر قرار می گیرد. این انکودر ها نسبت به دیگر انکودر ها ارزان تر هستند ولی نمی تواند جهت چرخش مشخص کند.

انکودر مطلق
این انکودر از چندین گیرنده و فرستنده تشکیل شده است که در چندین مسیر متفاوت قرار گرفتند .در هر زاویه بعضی از گیرنده ها روش می شوند که نشان دهند آن زاویه است با مشخص بودن مکان انکودر در هر لحظه ما ، جهت چرخش و سرعت و شتاب و مکان مشخص هر جسم حتی بعد از خاموش و روشن شدن انکودر داریم .این مزیت نسبت به انکودر نسبی ، افزایشی است چون بعد از خاموش شدن انکودر نسبی و افزایشی برای فهمیدن موقعیت جسم باید انکودر رو تنظیم کنیم .

انکودر افزایشی
تفاوت انکودر افزایشی با انکودر نسبی در این است که به جای یک فرستنده و گیرنده از دو فرستنده و گیرنده استفاده میکند که با هم اختلاف فاز ۹۰ درجه با هم دارند دارن که در شکل زیر میتوانید ببیند و بخاطر همین می تواند جهت چرخش شفت رو مشخص کند .
انکودر چرخشی (روتاری انکودر):
انکودر چرخشی در دو نوع انکودر زاویه نسبی و انکودر زاویه مطلق عرضه می شود. در نوع نسبی Incremental آن ، می توان موقعیت زاویه را بصورت نسبی دریافت کرد. این بدان معناست که بعد از خاموشی دستگاه، دیگر نمی توان موقعیت زاویه را مشخص کرد. همینطور اگر به هر علت خطایی در ارسال پالس انکودر یا خوانش آن توسط تجهیزات الکترونیک صورت پذیرد، اصلاح این خطا منوط به کالیبره شدن دستگاه خواهد بود. به همین علت است که در دستگاههایی که از انکودر چرخشی نسبی برای کنترل موقعیت استفاده می شود، سنسور یا میکروسوییچ یا ابزار مشابهی برای کالیبره کردن دستگاه وجود دارد. اما در عین حال استفاده از انکودر چرخشی نسبی برای تعیین سرعت ، معمولا دقت لازم را دارا می باشد و اثر خطا در ارسال یا دریافت پالس انکودر، مقطعی و لحظه ای خواهد بود.
انکودر چرخشی مطلق Absolute با توجه به ساختار داخلی آن می تواند موقعیت را به صورت مطلق ارسال نماید. این یعنی با خاموش شدن دستگاه و قطع برق و روشن شدن مجدد آن، انکودر می تواند موقعیت خود را به صورت دقیق اعلام نماید. باید دقت داشت که اگر انکودر چرخشی مطلق از نوع سینگل ترن Single Turn باشد تنها می تواند محدوده 0 تا 360 درجه را در خروجی نشان بدهد و به فرض اگر شفت دستگاه، هنگام خاموشی، یک دور اضافه چرخیده باشد، در این نوع انکودر امکان دستیابی به تعداد دور چرخیده شده وجود ندارد. اما در انکودر چرخشی Multi Turn که معمولا از باتری بکاپ بهره می برد، این امکان وجود دارد که در صورت چرخش بیش از یک دور نیز اطلاعات قابل خوانش و دستیابی باشد.
دقت مد نظر برای تعیین موقعیت زاویه. دقت زاویه ای مد نظر برای پروژه کنترل موقعیت خود را تعیین نمایید. انکودر 360 پالس دقتی معادل 1 درجه و انکودر 3600 پالس دقتی معادل 0.1 درجه دارا می باشد. همچنین انکودر مطلق 13 بیت که 13^2 موقعیت را گزارش می دهد، دقتی معادل 0.044 درجه خواهد داشت.
مزایای انکودر های absolute :
- حفظ و به یادآوری موقعیت بعد از خاموشی دستگاه و تداوم مانیتورینگ موقعیت
- امکان تعیین موقعیت ماشین و امکان ذخیره سازی دیتا الکترونیک
- امکان استفاده از گزینه های چند گانه مانند analog , Ethernet , fieldbus, parallel , serial
- استفاده از اندازه گیری نوری و مغناطیسی
- انکودر های مطلق دارای رزولوشن 16 بیت و یا 65.536 پالس در هر چرخش دارند (PPR)
مزایای انکودر های incremental :
- مناسب برای شمارش پالس های ساده یا مانیتورینگ فرکانس هایی همچون سرعت ، جهت و موقعیت
- مرقون به صرفه و مکانیزم ساده نسبت به انکودر های مطلق
- اندازه گیری مغناطیسی
- انکودر های INCREMENTAL ( افزایشی) دارای رزولوشن 50.000 PPR)PULSE PER REVOLUTION)