کنترل POSITION در سرو درایو

هنگامی که یک سرو موتور در مد کنترلی موقعیت (Position Control) قرار می گیرد، با دو روش قابل کنترل است:
- کنترل دیجیتال با ارسال قطار پالس مربعی
- کنترل انالوگ با ارسال ولتاژ خطی 0 تا 10 ولتبه حالتی که سروو را از طریق ولتاژ کنترل می کنیم حالت کنترل ولتاژی یا V-Command می گویند و به حالتی که سرو موتور را با پالس کنترل می کنیم حالت کنترل پالسی یا P-Command می گویند.
– در حالت کنترل ولتاژی سیستم سروو موتور، سیستم کنترلر موقعیت یک خروجی انالوگ را به سرو ارسال کرده و برای فیدبک از انکودر فیدبک سروو موتور استفاده می کند
– در حالت کنترل دیجیتال یا کنترل پالسی یک قطار پالس مربعی به سروو درایو ارسال می گردد و نیازی به گرفتن فیدبک نیست و دریافت فیدبک از سرو درایو می تواند بصورت اختیاری باشد.
مراحل تنظیم مد پوزیشنینگ در سرو درایو :
1- انتخاب نوع پالس ورودی :

2- تنظیم پارامتر های گیربکس الکترونیکی :
برای سرو دایو مدل سانیو به شرح زیر میباشد :

3- نحوه سیم کشی :


4- تنظیمات شبکه سرو درایو و PLC
– در مد موقعیت، درایو توسط تعداد پالسهای دریافت شده ، شفت موتور را حرکت میدهد. در نتیجه ، در این مد تعداد پالس، تعیین کننده مقدار حرکت سرو موتور میباشد. بسته به تنظیمات سرودرایو ، هر پالس سبب می شود که سرو موتور با یک زاویه تعیین شده حرکت کند .مثلا اگر درایو در 1000 پالس بر دور تنظیم شده باشد، موتور با 0.36 در هر پالس حرکت می کند.

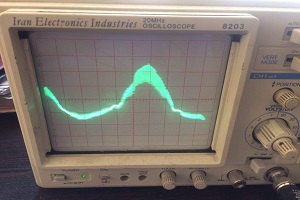
ارتباط بین سرعت و مسافت ارتباط بین سرعت و مسافت در شکل زیر تشریح شده است . مسافت پیموده شده در دیاگرام به صورت سطح زیر هر دو منحنی است. مساحت و تعداد پالس های خروجی در هر دو مورد یکسانند. از آنجا که منحنی آبی آهسته تر از منحنی قرمز حرکت می کند، زمان بیشتری طول می کشد تا آن مسافت را طی کند.

محاسبه تعداد پالس های درایو بدین صورت است:
نمونه محاسبه بیشترین دینامیک ممکن:
متغیرهای داده شده:
سرعت نامی سروموتور rpm MotorT = 3000
ماکزیمم فرکانس پالسCPU = 100,000 pps f(cpu)
نحوه محاسبه :